| ����|English |
| ��˾���� | | | ģ��չʾ | | | ���䰸�� | | | ģ���̳� | | | ���d���� | | | �ھ����� | | | ϵ�҂� |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ����朽�: | ����չ�[չʾģ������ | �Ϻ����ͻ�������˾ | |||||
| �Ϻ�����ģ��չʾ����˾(XiuMei Model) ������� Copyright © shmx6518.com All Rights Reserved. ��ICP��07508586̖-6 ������� | �Wվ�؈D | ϵ�҂� | |||||||







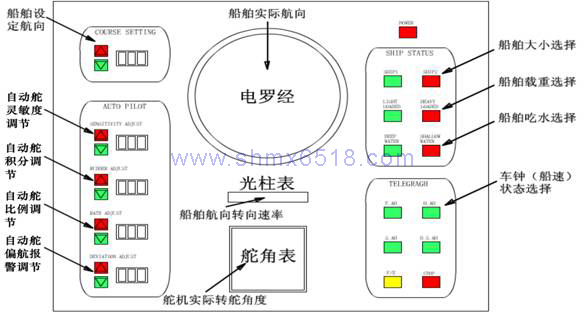
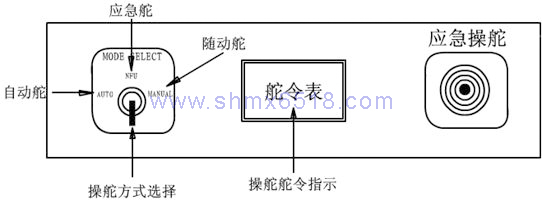
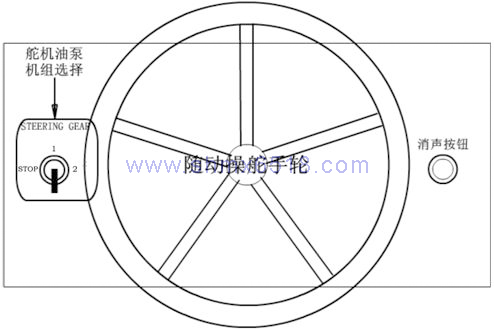
 ?һ��ϵ�y�M�ɣ�S7-200PLC CPU224��STEP7 Micro/win 4.0 SP4���ٶ��b�ã����M늙C���b�á������x���_�P���ٶ�ģʽ�x���_�P���ԄӶ桢�S�Ӷ桢�����棩���C�M�x���_�P��1#/2#���ã�����݆���������������_�����o�������H�������ָʾ�����o����ǡ����H������ǣ����`�����{��������{����������{����������{������DZ����{��������������ƫ�����O������ָʾ��ƫ����
?һ��ϵ�y�M�ɣ�S7-200PLC CPU224��STEP7 Micro/win 4.0 SP4���ٶ��b�ã����M늙C���b�á������x���_�P���ٶ�ģʽ�x���_�P���ԄӶ桢�S�Ӷ桢�����棩���C�M�x���_�P��1#/2#���ã�����݆���������������_�����o�������H�������ָʾ�����o����ǡ����H������ǣ����`�����{��������{����������{����������{������DZ����{��������������ƫ�����O������ָʾ��ƫ����